Let $x_i$ be the coordinates of a two-dimensional vector and let $x^\prime_i$ be the coordinates of the vector rotated by an angle $\theta$ in the plane. The components of the two vectors are related by a transformation as $$x^\prime_j = R_{ij} x_i$$ where $R_{ij}$ is a rotation matrix. This is a representation of the rotation group.
Specifically, a rotation by an angle $\theta$ in two dimensions matrix, $$ R(\theta) = \begin{pmatrix} \cos\theta & \sin \theta\\ - \sin \theta & \cos\theta \\ \end{pmatrix} $$
we do we got this matrix, can someone show me the argument or visualization?
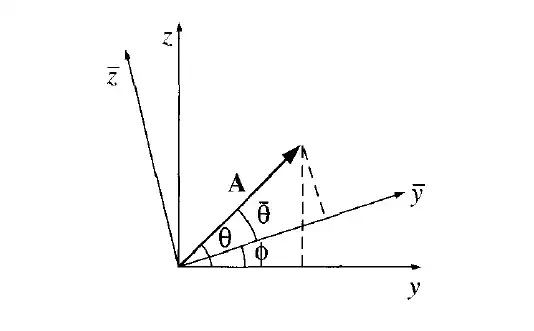 $$A_y=Acos(\theta)$$
$$A_z=Asin(\theta)$$
$$A_y=Acos(\theta)$$
$$A_z=Asin(\theta)$$