[I’m changing the notation slightly from that in the question. Uppercase symbols represent points/vectors in 3-D, and lowercase points/vectors in 2D.]
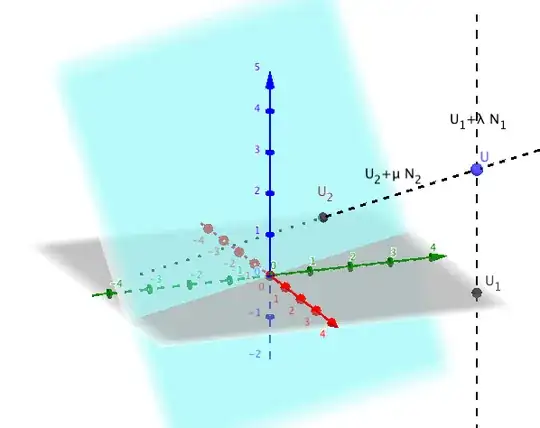
This is a fairly straightforward triangulation problem. Let $\mathbf N_1$ and $\mathbf N_2$ be then normals of the planes $\mathbf\pi_1$ and $\mathbf\pi_2$. If $\mathbf U_1$ and $\mathbf U_2$ are the projections of $\mathbf U$ onto these two planes, their back-projections are the lines $\mathbf U_1+\lambda\mathbf N_1$ and $\mathbf U_2+\mu\mathbf N_2$. $\mathbf U$ lies at the intersection of these lines.
In theory, you just have to compute this intersection to find $\mathbf U$. In practice, for the lines to intersect they must be coplanar and even a small perturbation to $\mathbf U_1$ or $\mathbf U_2$ will destroy this coplanarity. A straightforward way to get an estimate for $\mathbf U$ is to take the midpoint of the points of closest approach of the two lines. You can find a description of this fairly standard computation in this answer by marty cohen and many other places here and elsewhere on the Internet. (Of course, if $\mathbf\pi_1$ and $\mathbf\pi_2$ are two of the coordinate planes, you can just read the coordinates of $\mathbf U$ directly.)
If this estimate isn’t accurate enough, a more sophisticated approach is to find the smallest adjustment (in image space) to $\mathbf U_1$ and $\mathbf U_2$ that makes their back-projections coplanar. This is covered in detail in $§14.4$ of Hartley and Zisserman’s Multiple View Geometry In Computer Vision. I’ll just give the formula here; see the book for full details.
Given the correspondence $(u_1,v_1)\leftrightarrow(u_2,v_2)$ between a pair of points on the respective image planes, we want to find $(\hat u_1,\hat v_1)$ and $(\hat u_2,\hat v_2)$ such that $(u_1-\hat u_1)^2+(v_1-\hat v_1)^2+(u_2-\hat u_2)^2+(v_2-\hat v_2)^2$ is minimized. W.l.o.g. we can take $\mathbf\pi_1$ to be the $u$-$v$ plane, so that its camera matrix is the canonical $$P_1=\begin{bmatrix}1&0&0&0\\0&1&0&0\\0&0&0&1\end{bmatrix}.$$ This just picks out the $u$- and $v$-coordinates of $\mathbf U$. The projection matrix onto $\mathbf\pi_2$ will have the form $$P_2=\left[\begin{array}{c|c}M_{2\times 3}&\mathbf t\\\mathbf 0^T&1\end{array}\right].$$ The point $\mathbf U$ then satisfies the linear equations $P_1\mathbf U =\mathbf u_1=(u_1,v_1)$ and $P_2\mathbf U = \mathbf u_2=(u_2,v_2)$.
The affine fundamental matrix of this epipolar configuration is $$F_A=\begin{bmatrix}0&0&a\\0&0&b\\c&d&e\end{bmatrix}$$ where $$a = m_{23} \\ b=-m_{13} \\ c=m_{13}m_{21}-m_{11}m_{23} \\ d=m_{13}m_{22}-m_{12}m_{23} \\ e=m_{13}t_2-m_{23}t_1.$$ (In your case, where $P_2$ has no translation component, we would have $e=0$.) The adjusted coordinates are then given by the formula $$\begin{bmatrix}\hat u_2 \\ \hat v_2 \\ \hat u_1 \\ \hat v_1\end{bmatrix} = \begin{bmatrix}u_2 \\ v_2 \\ u_1 \\ v_1\end{bmatrix}-{au_2+bv_2+cu_1+dv_1+e\over a^2+b^2+c^2+d^2}\begin{bmatrix}a\\b\\c\\d\end{bmatrix}.$$ (You might recognize this as the result of a standard least-squares fit, which itself is basically a projection onto a hyperplane in $\mathbb R^4$.) With these adjusted coordinates in hand, you can then find the intersection of their back-projections in the ways described previously.
