[Updated about a week later]
I was interested in this same issue. Inspired by the Poincaré disk, I wanted to draw a disk on which an infinite plane was mapped. The plane is “decorated” with a procedural texture, so this is like the computer graphics operation of texture mapping.
Rendering the disk uses the inverse of the plane-to-disk map: given a position (of a pixel) on the disk, the inverse transform finds the corresponding point on the infinite “source” plane. If that “destination” point $d$ is on the disk, $\left\lVert d \right\rVert <1$, then the corresponding “source” point $s$ on the input texture is defined by this mapping, parameterized by scale $a$ and exponent $b$.
$$s= \frac{d} {a(1-\left\lVert d \right\rVert^b)}$$
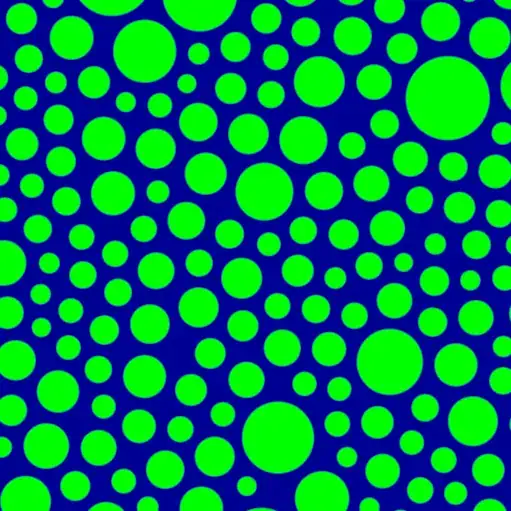
Shown below is a portion of source texture plane. This texture is defined procedurally across all of ℝ², or at least the part spanned by two floating point numbers:
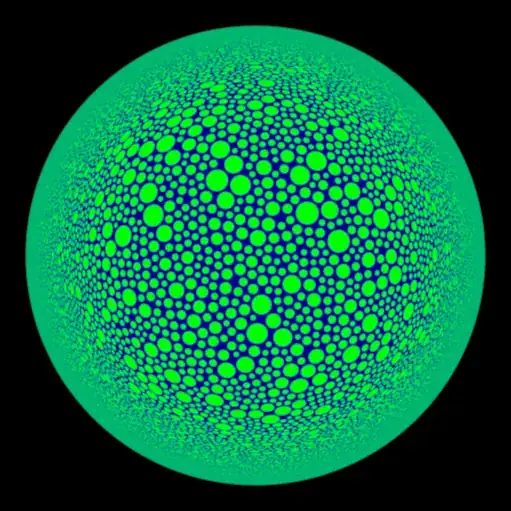
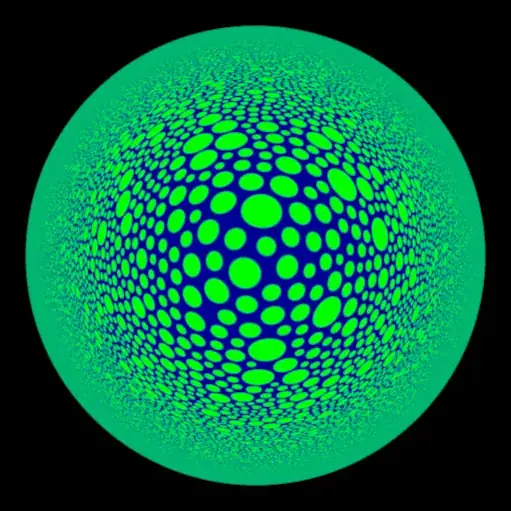
This shows the mapping for $a=1$ and $b=1$:
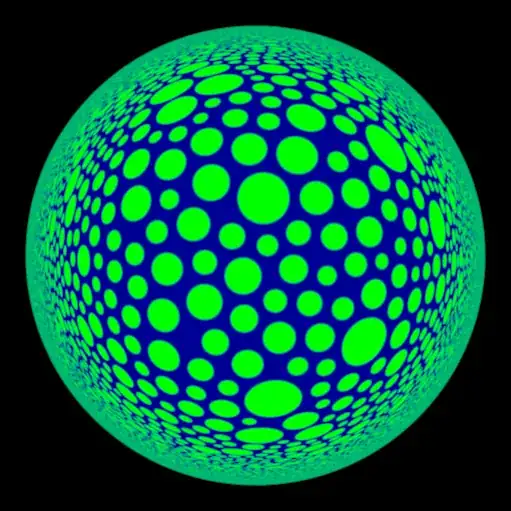
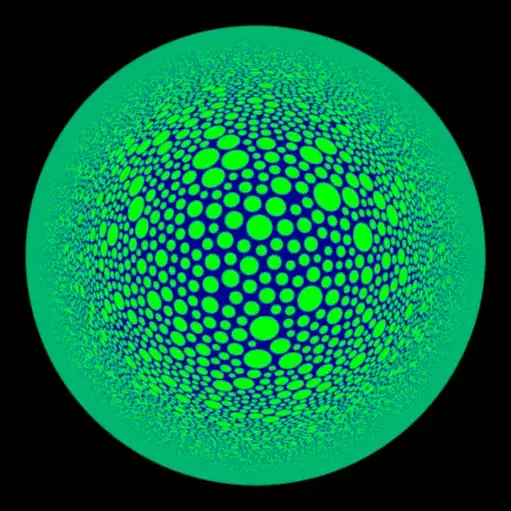
The Poincaré disk model itself, via Douglas Dunham, with $a=1/2$ and $b=2$:
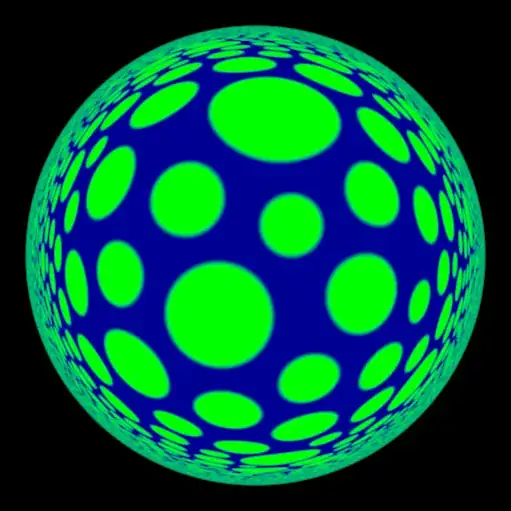
Here for $b=5$ we see the map for $a=1/3$, $a=1$, and $a=3$: