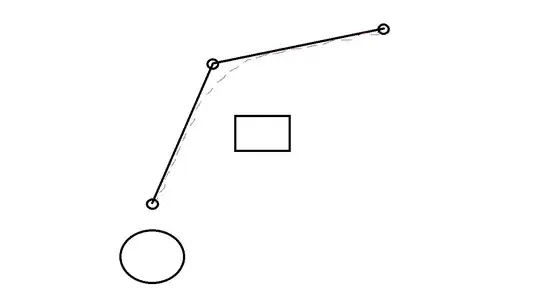
I used to play with path calculation techniques a lot when trying to make realistic flying sequences to be rendered in Teragen. I initially tried using Bézier Curves.
But discovered that (for flying at least) they aren't that useful. The reason is that the curvature between curves is discontinuous, and so cannot be used to calculate a continuous correct banking angle for a fly-by. Also, it's hard to be sure that the curve doesn't intersect an mountain.
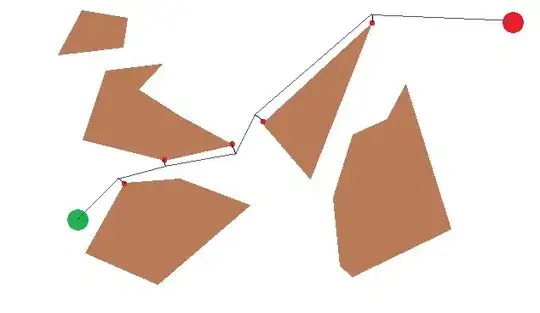
I digress. The way I eventually settled on was a simple mass-spring based path, and relax it into submission.
Subdivide the path into lots of little segments, the more the merrier. For each point, move it a little bit in a direction so as to reduce the angle between it and its neighbours, and way from the obstacles. Repeat many times until the path has settled down.
k = 0.01 // Adjust the values of k and j to your liking.
j = 0.01 // Small values take longer to settle. Larger values are unstable.
For each point P
normal_vector = vector_to_previous_point + vector_to_next_point
obstacle_vector = vector_to_nearest_obstacle
obstacle_distance = magnitude(obstacle_vector)
obstacle_vector *= obstacle_distance^2
P += (normal_vector * k) - (obstacle_vector * j)
The benefit of these kind of finite element relaxation techniques is that you can program all kinds of constraints into it, and the path will settle on some compromise between them, depending on the weights (j and k in this case).
If you're into robotics, why not come and join the Robotics Proposal?