After further clarifications in chat, it's now clear what the OP wanted, and my other solution did not apply at all.
It's an interesting problem. I didn't find an optimal solution but I found a solution. Anyone's welcome to provide a better one.
The problem
The OP has a 3D rotation matrix $M$ and a figure of arbitrary size on the plane of the screen that he wants to transform by $M$.
His desired visual result is the 3D rotation of the figure by the matrix $M$, followed by an orthographic projection on the screen plane obtained by discarding the $z$ component.
However, he can't just perform that operation, and instead the only operations over the figure he can do are scaling horizontally/vertically and rotating, all in 2D.
His goal, thus, is to find out which of these 2D transforms to apply, and in which order, for obtaining the same visual result as if the figure was transformed by the matrix $M$ and then projected orthographically on the screen by discarding the $z$ component.
Reduction
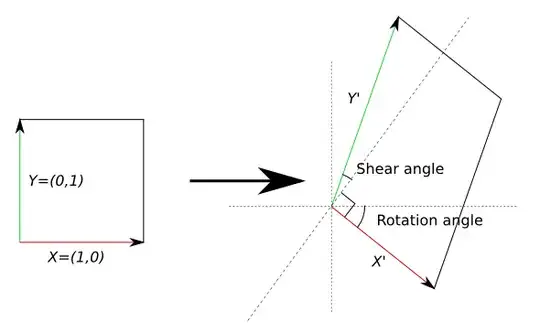
First, note that applying the rotation matrix, $M=\pmatrix{m_0&m_1&m_2\\m_3&m_4&m_5\\m_6&m_7&m_8}$, to the figure to represent and then projecting it orthogonally by discarding the $z$ component, has the same effect as applying the 2D transform $\pmatrix{m_0&m_1\\m_3&m_4}$ to the figure. This is easy to show: taking the screen as a plane in 3D and its origin as the reference coordinate system, the vectors of the untransformed basis are $(1,0,0), (0,1,0), (0,0,1)$, and therefore the vectors of the transformed basis are $(m_0,m_3,m_6), (m_1,m_4,m_7), (m_2,m_5,m_8)$. Nothing lies outside the z=0 plane so we don't need $(m_2,m_5,m_8)$ at all. After projecting the basis orthogonally by removing the $z$ component, we get a new 2D basis $(m_0,m_3), (m_1,m_4)$, which is the matrix.
Now the problem is reduced to the following, interesting question:
Given an arbitrary linear 2D transform matrix $\pmatrix{m_0&m_1\\m_3&m_4}$ (which may include shear), how can it be decomposed into a product of horizontal&vertical scaling matrices, and rotation matrices?
Optimal solution
It's clear that there are many possible solutions. However, I don't see how it can be done generally in less than the following three steps:
- Rotate it by the angle $\theta$ necessary for the next scaling step to get the correct dimensions and shear.
- Perform the scaling that will give it the correct shape.
- Rotate it by another angle $\phi$ to get the correct orientation.
In other words, find parameters $\theta, s_x, s_y, \phi$ such that:
$$\pmatrix{\cos\phi&-\sin\phi\\\sin\phi&\cos\phi}
\pmatrix{s_x&0\\0&s_y}
\pmatrix{\cos\theta&-\sin\theta\\\sin\theta&\cos\theta}
= \pmatrix{m0&m1\\m3&m4}$$
The trickiest part by far is to find the angle for (1), as (2) and (3) would be relatively easy (or vice versa: to find the angle for (3) and then (2) and (1) would be easier). I couldn't figure it out: when I attempted it, I got a big system of nonlinear equations that represent the constraints, bigger than I could cope with.
My solution
I've found a four-step solution (five in some cases, see edit). It works backwards from the rhomboid, as follows:
- Scale the rhomboid horizontally until all sides are equal. We get a rhombus.
If the shape was flipped, we make the scale negative. Alternatively, if negative scale is not applicable, or flipped surfaces are not desirable, don't paint the surface at all and stop here if it's flipped. (Flipping is handled in a separate step. See code.)
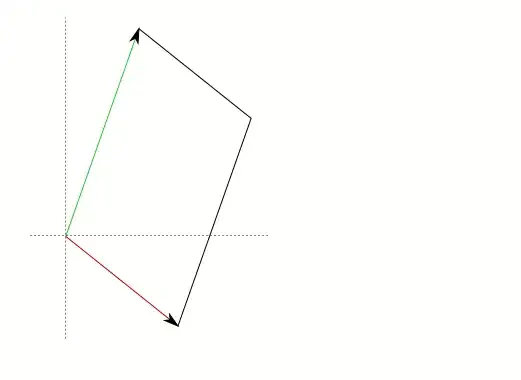
- Rotate the rhombus so the diagonal that starts at the origin is horizontal.
- Scale the rhombus horizontally and vertically to get a unit square.
- Rotate the square to make it upright and get the original $\pmatrix{1&0\\0&1}$ basis.
Once we have the steps, applying them in reverse order will perform the desired transform.
Step 1 works as follows. We have $(m_0,m_3), (m_1,m_4)$, the basis of the target transform. We want to find a scale factor $k$ such that $(m_0k)^2+m_3^2=(m_1k)^2+m_4^2$, i.e. such that when scaling the $x$ components by $k$, the lengths of the transformed basis vectors are equal. Solving for $k$ we get: $k=\sqrt{\frac{m_4^2-m_3^2}{m_0^2-m_1^2}}$, but we apply the sign of the determinant of the matrix $m_0m_4-m_1m_3$ to it, to unflip it if it was flipped.
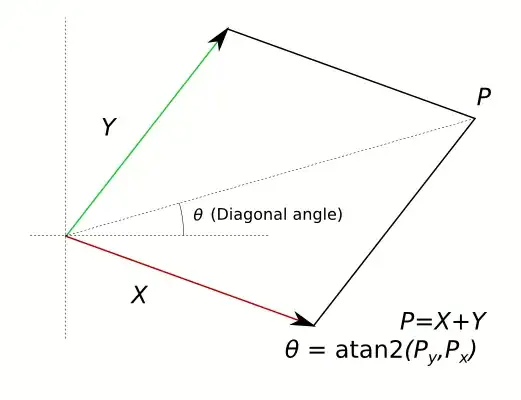
For step 2, the angle of the transform is simply minus the angle of the diagonal: $\theta=-\mathrm{atan2}(m_3+m_4, (m_0+m_1)k)$
For step 3, we need to scale both diagonals so that their final length is $\sqrt 2$ (the diagonal of a unit square). Since in step 2 we just rotated, for this step we can take the diagonal of the vectors before being rotated, as their lengths will be the same. These diagonals are $\|((m_0+m_1)k, m_3+m_4)\|$ and $\|((m_0-m_1)k, m_3-m_4)\|$, therefore dividing $\sqrt 2$ by them will give us the scale factor in each axis.
Lastly, step 4 is simply a 45° rotation.
But you need to apply these steps in reverse to get the desired result. First, calculate $j=1/k=\sqrt{\frac{m_0^2-m_1^2}{m_4^2-m_3^2}}$, then:
- Rotate by -45°.
- Scale by $$s_x=\frac{\|(\frac{m_0+m_1}{j}, m_3+m_4)\|}{\sqrt 2},\,\,s_y=\frac{\|(\frac{m_0-m_1}{j}, m_3-m_4)\|}{\sqrt 2}$$
- Rotate by $\theta=\mathrm{atan2}(m_3+m_4, (m_0+m_1)/j)$
- Scale horizontally by $\mathrm{copysign}(j, m_0m_4-m_1m_3)$
That should give the desired result. Note the caveat that if $|m_4|=|m_3|$, then you would get a division by zero when calculating $j$, and if $|m_0|=|m_1|$, you would get it when dividing by $j$. The interpretation of that and the action to take if that case arises, is left as an exercise to the reader
EDIT: OK, that was lazy, so let me expand. If both absolute value equalities match, it's telling us that either the vectors match, or they are aligned and opposite, or we already have a rhombus and are ready to get a square by just scaling (but it has to be considered which of four possible angles the diagonal is at, and act accordingly, considering flipping too) (flipping is done as a separate step). However, there's yet another case that I hadn't considered: when calculating $k$, we might be trying to take the square root of a negative number. If that's the case, then the problem is that there's no possible scale value that allows transforming the rhomboid into a rhombus. In that case, starting by a rotation of the initial rhomboid to bring the diagonal longest vector to the X axis (that is, a rotation by $\phi=-\mathrm{atan2}(m_3,m_0)$ or $\phi=-\mathrm{atan2}(m_4,m_1)$, whichever is the longest) should suffice to make $k$ valid. In that case, don't forget to apply that rotation as the last step when doing it forwards. That will help also in the case that the denominator of $j$ is zero or $j$ itself is zero.
Note: It's possible that the angles should be applied with the sign changed, given that the sign of the Y axis is reversed.
EDIT 2: Proof of concept using the pygame API:
import pygame, math
# Includes the minus sign necessary for rotating in the right direction
RAD_TO_DEG = -180/math.pi
def Transform3D(Surf, M):
"""Transform a surface by an arbitrary 2D or 3D matrix.
Returns the transformed surface or None if it's not visible.
"""
tol = 0.0001 # tolerance for too low scale
# Aliases for commodity
flip = pygame.transform.flip
rotate = pygame.transform.rotate
scale = pygame.transform.smoothscale # or .scale, your choice
m0 = M[0][0]
m1 = M[0][1]
m3 = M[1][0]
m4 = M[1][1]
# Determinant zero?
det = m0*m4 - m1*m3
if abs(det) < tol:
# Aligned - don't draw
return None
# Determinant negative?
if det < 0:
# Toggle the basis vectors
m0,m1 = m1,m0
m3,m4 = m4,m3
# Flip and rotate to act as if X and Y were inverted
Surf = rotate(flip(Surf, True, False), 90)
# Calculate the numerator and denominator of k
kn = m4*m4 - m3*m3
kd = m0*m0 - m1*m1
Phi = 0 # Fixup angle to allow getting a rhombus by horizontal scaling
if abs(kd) < tol and abs(kn) < tol:
# We have either a rhombus or aligned vectors. Which is it?
# We test that by checking if there's exactly one different sign
# (by checking the parity)
if (m0 < 0) ^ (m1 < 0) ^ (m3 < 0) ^ (m4 < 0):
k = 1
else:
# Quadrants are opposite or equal - vectors are same length and
# either matching or opposite
return None # Don't paint
else:
# Rhomboid.
# There's work to do. First, check if we can get a rhombus by
# scaling horizontally.
if ((kn < 0) ^ (kd < 0)) or abs(kn) < tol or abs(kd) < tol:
# This would generate a negative square root, or a zero or
# infinite k, meaning that scaling horizontally to get a rhombus
# is not possible. Deal with it by applying a rotation as an extra
# last step, and transforming the input matrix.
# Rotate to bring the largest side to the X axis
if m3*m3 + m0*m0 > m4*m4 + m1*m1:
Phi = -math.atan2(m3, m0)
else:
Phi = -math.atan2(m4, m1)
c = math.cos(Phi)
s = math.sin(Phi)
# Apply the rotation to our matrix
m0,m1,m3,m4 = c*m0-s*m3, c*m1-s*m4, s*m0+c*m3, s*m1+c*m4
# Recalculate the numerator and denominator of k
kn = m4*m4 - m3*m3
kd = m0*m0 - m1*m1
# Signs should be equal now
assert (kn >= 0) ^ (kd < 0)
k = math.sqrt(kn / kd)
# All angles are inverted in the calls to rotate()
# First rotate the surface by -45 deg
Surf = rotate(Surf, 45)
# Scale it appropriately
sx = ((m0+m1)*k)**2+(m3+m4)**2
sx = int(math.sqrt(sx*0.5) * Surf.get_width() + 0.5)
sy = ((m0-m1)*k)**2+(m3-m4)**2
sy = int(math.sqrt(sy*0.5) * Surf.get_height() + 0.5)
Surf = scale(Surf, (max(sx, 1), max(sy, 1)))
# Rotate by the required angle
Surf = rotate(Surf, math.atan2(m3+m4, (m0+m1)*k)*RAD_TO_DEG)
# Scale horizontally to get the correct shape
sx = int(Surf.get_width()/k+0.5)
Surf = scale(Surf, (max(sx, 1), Surf.get_height()))
if Phi:
# Apply the final rotation if necessary
Surf = rotate(Surf, -Phi*RAD_TO_DEG)
# Get our prize
return Surf
import time
def main(M):
width, height = 320, 240
screen = pygame.display.set_mode((width, height))
fig = pygame.image.load("square.png")
origfigrect = fig.get_rect()
black = (0, 0, 0)
surf = Transform3D(fig, M)
if surf is None:
fig.fill(black)
else:
fig = surf
Axes = False # toggles every .4 seconds to blink the axes
while 1:
for event in pygame.event.get():
if event.type == pygame.QUIT: return
screen.fill(black)
figpos = (160-fig.get_width()/2, 120-fig.get_height()/2)
screen.blit(fig, figpos)
Axes = not Axes
if Axes:
Cx = (M[0][0]+M[0][1])*0.5 * origfigrect.w
Cy = (M[1][0]+M[1][1])*0.5 * origfigrect.h
Ox = int(width/2 - Cx + 0.5)
Oy = int(height/2 - Cy + 0.5)
L1x = int(M[0][0]*origfigrect.w + Ox + 0.5)
L1y = int(M[1][0]*origfigrect.h + Oy + 0.5)
L2x = int(M[0][1]*origfigrect.w + Ox + 0.5)
L2y = int(M[1][1]*origfigrect.h + Oy + 0.5)
pygame.draw.line(screen, (0,255,0), (Ox, Oy), (L2x, L2y))
pygame.draw.line(screen, (255,0,0), (Ox, Oy), (L1x, L1y))
pygame.display.flip()
time.sleep(.4)
pygame.init()
main([[0.473021, 0.579769, 0.663414],
[-0.296198, 0.813798, -0.500000],
[-0.829769, 0.040009, 0.556670]]
)
pygame.quit()
Sample image used for my tests:

(Note that while adding the code, I've hit a bug in SE where the 0's and 1's within square brackets in the code were replaced by other numbers - I hope I've caught and restored all of them correctly.)
Edit 3: I asked the specific question about the decomposition, and got an answer which finds the optimal solution: Decompose a 2D arbitrary transform into only scaling and rotation