Let us give the name $(C_p)$ $(p>0)$ to the curve with implicit equation :
$$|x|^p+|y|^p=1 \tag{1}$$
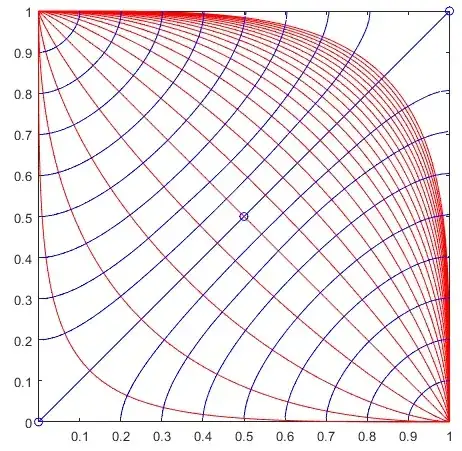
Fig. 1 : (some) curves $(C_p)$ in red. (Some of) their orthogonal curves in blue.
Due to the symmetry of curves $(C_p)$ with respect to coordinate axes, our study can be restricted to the square $(S):=(0,1)^2$, allowing to drop the $|...|$ symbols.
Important remark : curves $(C_p)$ provide a foliation of square $(S)$, i.e., that for each $(a,b) \in (S)$ there exists a unique $p=p(a,b)$ such that $a^p+b^p=1$.
We are going to work on
- the following parametric representation of curves $(C_p)$ :
$$\begin{cases}x&=&x(t)&=&(\cos t)^{(2/p)}\\y&=&y(t)&=&(\sin t)^{(2/p)}\end{cases} \ \ (0 \le t \le \pi/2)$$
- with a numerical approach combining a Runge-Kutta ODE solver (implemented in Matlab ; see program below) and Newton's method.
The tangent vector to $(C_p)$ in point $(x(t),y(t))$ is :
$$\begin{cases}x'(t)&=&\frac{2}{p}(\cos t)^{(2/p-1)}(-\sin t)&=&-\frac{2}{p}x(t) \tan t\\y'(t)&=&\frac{2}{p}(\sin t)^{(2/p-1)}\cos t&=& \ \ \ \frac{2}{p}y(t)\frac{1}{\tan t}\end{cases} \tag{2}$$
Orthogonal trajectories are obtained by replacing in (2)
$$\pmatrix{x'\\y'} \ \text{by} \ \pmatrix{\ \ y'\\-x'}$$
which means that the current point $(X,Y)$ is a solution to the following differential system :
$$\begin{cases}X'&=&\frac{2}{p}Y\frac{1}{\tan t}\\Y'&=&\frac{2}{p}X \tan t\end{cases}\tag{3}$$
We can get rid of common factor $\frac{2}{p}$, giving the simpler system :
$$\begin{cases}X'&=&Y\frac{1}{\tan t}\\Y'&=&X \tan t\end{cases}\tag{4}$$
System (4) cannot be given "as such" to an ODE solver. We need for that to express $t$ (and in fact $p$ as well) as functions of $X$ and $Y$ :
- for $t$, we use relationships :
$$\begin{cases}x&=&(\cos t)^{2/p}\\1 + (\tan t)^2 &=& \frac{1}{(\cos t)^2} \end{cases} \ \ \text{giving} \ \ \tan t = \sqrt{\tfrac{1}{x^p}-1}$$
- for $p$ : being given a point with coordinates $(a,b)$ in square $(S)$, how can we "output" the unique value of $p$ such that : $a^p+b^p=1$ (according to the "foliation" principle) ? By using Newton's algorithm, i.e., with the recurrence relationship :
$$p_{n+1}=p_n - \frac{f(p_n)}{f'(p_n)}$$
where $f(x):=a^x+b^x-1$ and $f'(x)=\ln(a)a^x+\ln(b)b^x,$
with appropriate initial values and a sufficient number of steps (see last function in the Matlab program below, where discrepancy (named "tolerance") has been tested to be extremely low in all cases).
Remarks :
- The initial points which have been chosen are
$I_k=(k/10,0.01)$ for $k=2,3...9$ (close to the lower border of the square).
(1) is the equation of the frontier of p-norm balls ; the range of values of $p$ have been taken from $1/3$ to $4$ with a step $1/6$ ; values of $p$ less than $1$ are not associed with norms.
the orthogonal curves are orthogonal to the sides of the square $[0,1]^2$ ; this isn't surprising because the limit ball $lim_{p \to \infty} (C_p)$ is the square $(S)$, corresponding to the $\|...\|_{\infty}$ ball).
the orthogonal curves are very similar to circular arcs in the vicinity of points $(1,0)$ and $(0,1)$.
Matlab program :
function pnorm
clear all;close all;hold on;axis equal;box on;
plot([0,0.5,1],[0,0.5,1],'-ob'); % diagonal
p0=1/3;p1=4;s=1/6;
t=0:0.01:pi/2;
for p=p0:s:p1;
e=2/p;
plot(cos(t).^e,sin(t).^e,'r');
end;
ode = @(t,V) sc(t,V);
for n=2:9; % 8 orthogonal curves below y=x
V0=[n/10,0.01]; % initial points
tspan=0:0.01:15;
[t,V] = ode45(ode, tspan, V0); % a Runge Kutta variant
x=V(:,1);y=V(:,2);
plot(x,y,'b');hold on;axis([0,1,0,1]);
plot(y,x,'b');hold on;axis([0,1,0,1]); % symmetric curves wrt y=x
end;
function Vp = sc(t,V);
X=V(1,:);Y=V(2,:);
[p,to]=er(X,Y);
ta=sqrt(1/X^p-1);
Vp=[Y/ta;X*ta]; % derivatives
function [p,to]=er(a,b) % exponent recovery
p=a^(0.2)+b^(0.2); % Newton's method with 15 steps :
for k=1:15
p=p-(a^p+b^p-1)/(log(a)a^p+log(b)b^p);
end;
to=a^p+b^p-1; % tolerance
