Yes this is possible (for some systems). You can take a look at:
Bazanella, Alexandre S., Petar V. Kokotovic, and Aguinaldo S. e Silva. "On the control of dynamic systems with unknown operating point." 1997 European Control Conference (ECC). IEEE, 1997.
In short, if you have a system:
$$
\dot{x}=f(x)+g(x)u
$$
and $f(x^*) = 0$ but you don't know $x^*$ then you can use $u=\varphi(x-x^*)$ together with an adaptive control loop that estimates $x^*$:
$$
\begin{align}
\dot{x} &= f(x)+g(x)\varphi(x-\theta)\\
\dot{\theta}&=A(x-\theta)
\end{align}
$$
In the paper you can find some ideas how you can find $A$.
They also have this example:
$$
\dot{x} = \sin(x) - \frac{1}{2}+u
$$
Assume you don't know that one equilibrium is $x^*=\frac{\pi}{6} = 30°$. So:
$$
\begin{align}
\dot{x} &= \sin(x) - \frac{1}{2}+u\\
u&=-k(x-\theta)\\
\dot{\theta}&=a(x-\theta)
\end{align}
$$
I use higher gains than in the paper: $k=150,a=-100$. Simulation with $x(0)=0,\theta(0)=0$:
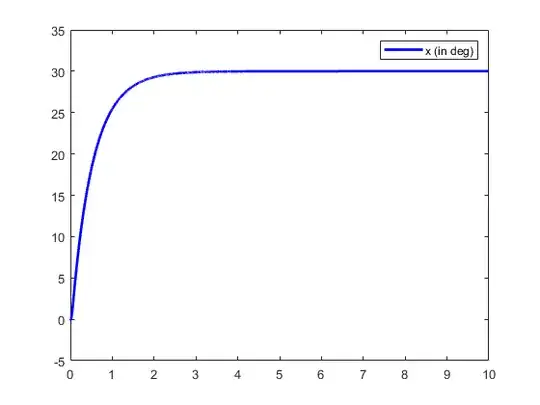
You can see the controller stabilizes the unknown operating point at $x=30°$ without having any knowledge about that point.
