Note: This answer shows how to describe similar approach/avoidance problems using a polyline, i.e. a path composed of straight line segments.
If we use a coordinate system where initially we are at $(0, 0)$ and the other person is at $(12, 0)$, then walking in three straight line segments,
$$\begin{array}{c|c|c}
\text{ From } & \text{ To } & \text{ Distance } \\
\hline
(0, 0) & (2\sqrt{3}, 6) & 6.92820323 \\
(2\sqrt{3}, 6) & (4.7939891, 6) & 1.32988748 \\
(4.7939891, 6) & (12, 0) & 9.37691810 \\
\end{array}$$
we reach $(12, 0)$ by walking $17.635\text{ ft}$ ($17.635009\text{ ft}$).
If we use $\bigr(x(d),y(d)\bigr)$ for our position at distance $d$, and $(12 - d, 0)$ for the position of the other person, $\bigr(x(d) - z(d)\bigr)^2 + \bigr(y(d)\bigr)^2 \ge 6$ for $d \in \mathbb{R}$.
We can parametrize the path as a polyline, using
$$\left\lbrace ~ \begin{aligned}
x(d) &= \frac{(d_{i+1} - d) x_i + (d - d_i) x_{i+1}}{d_{i+1} - d_i} \\
y(d) &= \frac{(d_{i+1} - d) y_i + (d - d_i) y_{i+1}}{d_{1+1} - d_i} \\
\end{aligned} \right ., \quad d_i \le d \le d_{i+1} \tag{1}\label{None1}$$
where $d$ is the distance traveled, $x(d_0) = x_0$, $x(d_1) = x_1$, $y(d_0) = y_0$, $y(d_1) = y_1$, if
$$d_1 - d_0 = \sqrt{ (x_1 - x_0)^2 + (y_1 - y_0)^2 } \tag{2}\label{None2}$$
For this suggested solution, we have three line segments ($i = 0, 1, 2$) and
$$\begin{array}{c|c|c|c}
i & x_i & y_i & d_i \\
\hline
0 & 0 & 0 & 0 \\
1 & 2\sqrt{3} & 6 & 6.92820323 \\
2 & 4.7939891 & 6 & 8.25809071 \\
3 & 12 & 0 & 17.63500881 \\
\end{array} \tag{3}\label{None3}$$
Feel free to verify $\eqref{None2}$ using the shown values; they do match.
The separation distance squared $S(d)$ is
$$S_i(d) = \bigr( x(d) - z(d) \bigr)^2 + y(d)^2 \tag{4a}\label{None4a}$$
which is a quadratic function in $d$,
$$S_i(d) = W_i d^2 + V_i d + U_i \tag{4b}\label{None4b}$$
where
$$\begin{aligned}
W_i &= \frac{(x_{i+1} - x_i + d_{i+1} - d_0)^2}{(d_{i+1} - d_i)^2} \\
V_i &= \frac{ 2 (d_{i+1} y_i - d_i y_{i+1}) (y_{i+1} - y_i) + 2 (d_{i+1} x_i - d_i x_{i+1})(x_{i+1} - x_i) } { (d_{i+1} - d_i)^2 } \\
~ &+ \frac{ 2 (d_{i+1} + 12) x_i - 2 (d_i + 12) x_{i+1} }{ d_{i+1} - d_i } - 24 \\
U_i &= \frac{ (d_i y_{i+1} - d_{i+1} y_i)^2 + (d_i x_{i+1} - d_{i+1} x_i)^2 }{ (d_{i+1} - d_i)^2 } \\
~ &+ \frac{ 24 d_i x_{i+1} - 24 d_{i+1} x_i }{ d_{i+1}-d_i } + 144 \\
\end{aligned} \tag{4c}\label{None4c}$$
If $$L_i \le \frac{-V_i}{2 W_i} \le L_{i+1}, \quad W_i \gt 0, \quad V_i \lt 0 \tag{4d}\label{None4d}$$
then the separation distance has a minimum at $-V_i/2 W_i$. This is true for all three line segments. The squared separation distance at that point is
$$\min S_i = U_i - \frac{V_i^2}{4 W_i} \ge 6^2 \tag{4e}\label{None4e}$$
For this suggested minimum path,
$$\begin{array}{c|c|c|c|c|c}
i & W_i & V_i & U_i & \frac{-V_i}{2 W_i} & \sqrt{U_i - \frac{V_i^2}{4 W_i}} \\
\hline
1 & 3 & -36 & 144 & 6 & 6 \\
2 & 4 & -61.8564067 & 275.1384396 & 7.7320508 & 6 \\
3 & 3.5369679 & -62.3744595 & 310.993536 & 8.8175044 & 6 \\
\end{array} \tag{4f}\label{None4f}$$
i.e., we come to within the minimum allowed distance three times during the walk, after walking $6$, $7.73$, and $8.82 \text{ ft}$, but keep further away than that for the rest of the walk.
Again, feel free to verify these.
This approach can be generalized to numerically evaluate any similar problem with the path described using a polyline, i.e. a continuous curve formed from line segments. In such cases, note that when $\eqref{None4d}$ is not true, the minimum distance is reached at the path vertices, so the separation distance need to be verified there too. (In this case, the distances at the path vertices are $12$, $6.211657$, $6.091541$, and $17.63501$, and did not need to be verified because $\eqref{None4d}$ is true for all path segments.)
In general, an optimum polyline path is such that every line touches the (moving) exclusion zone. It is not always trivial to decide how many line segments are needed, or how to place them, however. So, perhaps this method is better described as showing how to verify and minimise the length of a candidate path.
In this particular case, for all deflection angles $\theta$ (away from the ongoing walker, $0° \lt \theta \lt 90°$), the first minimum distance case happens when both have walked $6\text{ ft}$. This may be surprising, but it is a direct consequence of
$$\begin{aligned}
x(d) &= d \cos\theta \\
y(d) &= d \sin\theta \\
z(d) &= 12 - d \\
s(d) &= \bigr( x(d) - z(d) \bigr)^2 + y(d)^2 \\
~ &= 2 d^2 (1 + \cos\theta) - 24 d (1 + \cos\theta) + 12^2 \\
\end{aligned}$$
The derivative of $s(d)$ is zero at $t$,
$$\frac{d s(d)}{d d} = (d - 6)(1 + \cos\theta) = 0 \quad \iff d = 6$$
and the distance at that point is
$$\sqrt{s(6)} = 6\sqrt{2}\sqrt{1 - \cos\theta}$$
For that to match $6$,
$$6\sqrt{2}\sqrt{1 - \cos\theta} = 6 \quad \iff \quad \cos\theta = \frac{1}{2}$$
i.e. $\theta = 60°$. So, the initial part of the initial line is fully determined by the situation.
It also gives a good guideline on how to efficiently pass oblivious people (assuming roughly the same walking speeds): divert your direction initially by $60°$, and walk in that direction until the separation is halved. Proceed from there.
Below is a small Python program (CC0-1.0 aka Public Domain) that starts with the fully defined initial line segment, then keeps to the $6\text{ ft}$ separation until it has a direct line of sight to the target. The total distance is $17.446895\text{ ft}$. The curved part is, like Crystomath answered, not circular or elliptic. The actual path taken:
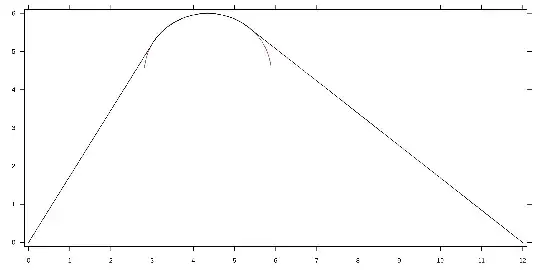
The red part is a circular approximation of the arc, with radius $1.539033\text{ ft}$ and center at $(4.352082\text{ ft}, 4.460968\text{ ft})$, just to show how close the arc is to a circle – the absolute error is less than $0.007762\text{ ft}$ (less than an eighth of an inch, or about $2.4\text{ mm}$).
The path contains three parts. It begins with the initial line segment from $(0, 0)$ to $(3, 3\sqrt{3}) \approx (3, 5.196152)$. There it continues with at least $C^1$ continuity, as a near-circular curve, to $(5.339950, 5.634042)$. (At $(4.352082, 6)$ the curve has the maximum $y$ coordinate, and that's where the two walkers have the same $x$ coordinate.) The path is completed with a final line segment to $(12, 0)$. The lengths of the respective segments are $6\text{ ft}$, $2.723439\text{ ft}$, and $8.723457\text{ ft}$.
The actual path was generated using the below Python code. It uses a configurable step size s (currently set at $1/64$th of an inch, or $1/(12\cdot 64)\text{ ft}$), with the polyline vertices at exactly $6 \text{ft}$ separation from the other person. Given short enough steps, this will yield a very precise approximation of the actual path.
from math import sqrt, sin, cos, pi
def distance(x, y):
return sqrt(xx + yy)
def other(d):
return 12.0-d, 0
def avoid(x, y, other_x, other_y, separation, step=1.0/1024, dymin=-1.0, dymax=1.0):
d2 = separationseparation
while True:
dy = (0.5dymin) + (0.5dymax)
dx = sqrt(1.0 - dydy)
new_x = x + dxstep
new_y = y + dystep
if dy == dymin or dy == dymax:
return new_x, new_y
s2 = (new_x - other_x)*(new_x - other_x) + (new_y - other_y) * (new_y - other_y)
if s2 < d2:
dymin = dy
elif s2 > d2:
dymax = dy
else:
return new_x, new_y
Actual fit is r=1.53031696, x0=4.346895, y0 = 4.469692
def sample(out, x, y, other_x, other_y, d, note=None):
global fit_r, fit_x0, fit_y0, fit_min, fit_max
r = sqrt((x - other_x)(x - other_x) + (y - other_y)(y - other_y))
out.write("%9.6f %9.6f %9.6f %9.6f %9.6f %9.6f" % (d, x, y, other_x, other_y, r))
if x >= fit_x0 - fit_r and x <= fit_x0 + fit_r:
fit_dy = fit_y0 - y + sqrt(fit_rfit_r - (x - fit_x0)(x - fit_x0))
fit_min = min(fit_min, fit_dy)
fit_max = max(fit_max, fit_dy)
out.write(" %+9.6f" % (fit_dy))
if note is not None:
out.write(" %s" % note)
out.write("\n")
if name == 'main':
from sys import stdout, stderr
stderr.write("Length Our_x Our_y Other_x Other_y Separation\n")
fit_x0 = 4.352082
fit_y0 = 4.460968
fit_r = 1.539033
fit_min = 6
fit_max = 0
x = 3
y = 3*sqrt(3)
d = 6.0 # sqrt(3^2 + (3*sqrt(3))^2) = sqrt(9 + 9*3) = sqrt(36) = 6
R = 6.0
s = 1.0/(12*64) # 1/64th of an inch
sample(stdout, 0, 0, *other(0), 0, "Initial")
sample(stdout, x, y, *other(d), d, "First contact")
# Avoid
while True:
other_x, other_y = other(d + s)
next_x, next_y = avoid(x, y, other_x, other_y, R, s)
if next_x <= other_x:
x, y, d = next_x, next_y, d + s
else:
smin = 0
smax = s
while True:
smid = smin + 0.5*(smax - smin)
other_x, other_y = other(d + smid)
next_x, next_y = avoid(x, y, other_x, other_y, R, smid)
if next_x < other_x:
smin = smid
elif next_x > other_x:
smax = smid
else:
break
x, y, d = next_x, next_y, d + smid
if next_x >= other_x:
sample(stdout, x, y, other_x, other_y, d, "Peak")
break
else:
sample(stdout, x, y, other_x, other_y, d)
# Veer back
while True:
other_x, other_y = other(d + s)
next_x, next_y = avoid(x, y, other_x, other_y, R, s)
# Do not overcorrect from target
if (next_x * y - next_y * x) <= 12.0 * (y - next_y):
break
x, y, d = next_x, next_y, d + s
sample(stdout, x, y, other_x, other_y, d)
# Final line segment
next_x = 12
next_y = 0
d += sqrt((next_x - x)*(next_x - x) + (next_y - y)*(next_y - y))
sample(stdout, next_x, next_y, *other(d), d)
stderr.write("Done. Total path length is %.6f and circular fit y difference was %+.6f to %+.6f\n" % (d, fit_min, fit_max))
By taking the curved path instead of the polyline, one saves a whopping $0.188\text{ ft}$, or approximately two and a quarter inches.



