The divergence a 2D vector Field $\mathbf{F}(x,y) = F_x(x,y)\, \hat{i} + F_y(x,y)\, \hat{j}$ is defined as $$\mathrm{div}\,\mathbf{F} = \bigg( \dfrac{\partial F_x}{\partial x} + \dfrac{\partial F_y}{\partial y}\bigg).$$ This can be calculated IF a function $\mathbf{F}(x,y)$ is given.
How do I compute the divergence if I don't know the function $\mathbf{F}(x,y)$ that describes my vector field but rather I have an array of numbers (noisy) that form a vector field as depicted below.
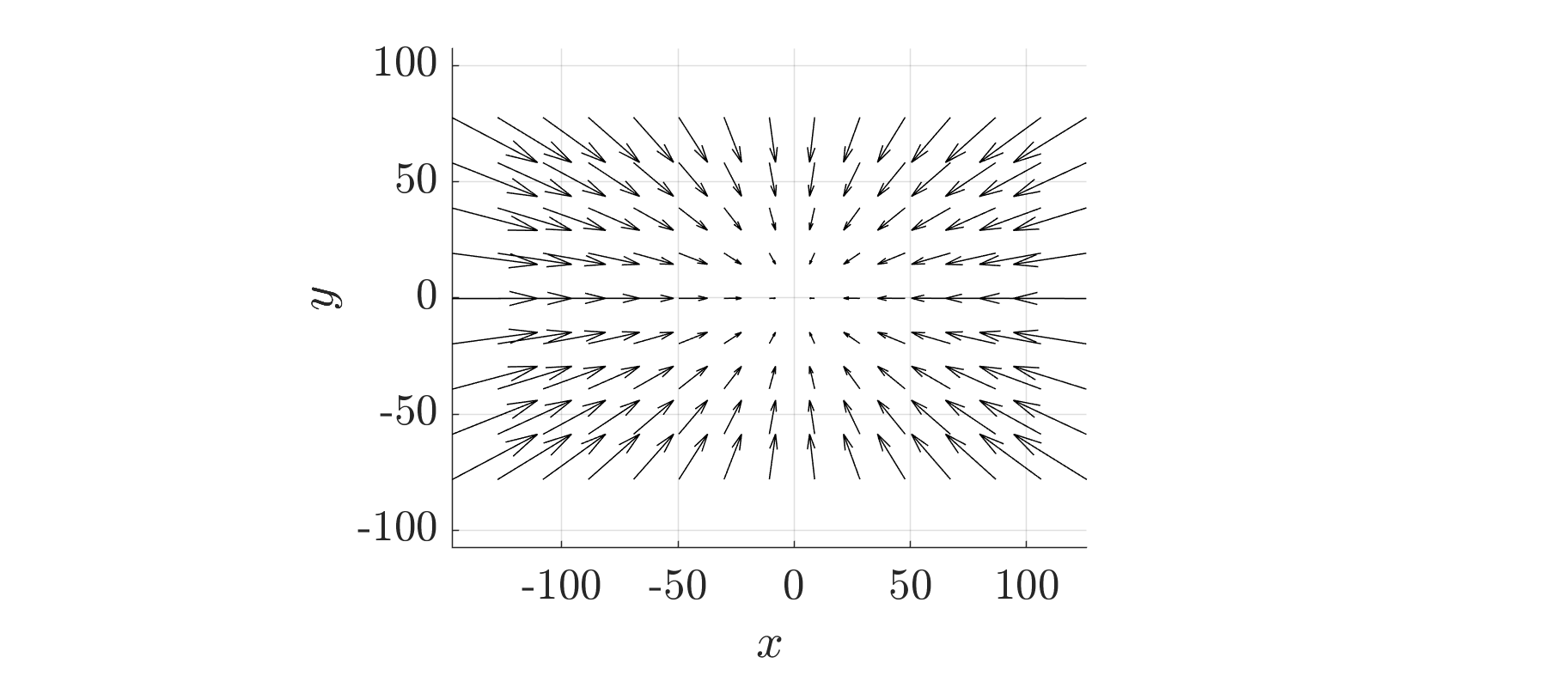
I know only the $(x,y)$ coordinates of the tip and the tail of each vector. Just by looking at the picture below, the field has a negative divergence. How can one calculate the divergence of such a field?
Note: This is a part of the problem addressed here