The Problem
On an infinite plane there are two points, $A$ and $B$, a unit distance apart. There is a $50\%$ probability that there is an invisible wall somewhere between the two points. The wall extends $1/3$ unit in each direction perpendicular to the line between $A$ and $B$, and its position is uniformly distributed between the two points. You don't know if the wall is present or where it is until you run into it.
What strategy minimizes the expected distance to travel to point $B$ from point $A$?
(This problem originally came from Puzzling.SE but was closed for being "too mathy.")
My Solution
I use an $x$/$y$ coordinate system on the plane with the origin at $A$, and $B$ on the positive $x$-axis.
Once the position of the wall is known (i.e. when you run into the wall) the best strategy is to walk straight along the wall to the nearest end, then travel straight to $B$. The best strategy should therefore be to follow a fixed path from $A$ to $B$ until you reach $B$ or hit the wall; if you hit the wall, follow the previously stated path around the wall.
I break up the fixed part of the path into a number of small segments. A given segment covers a horizontal distance $\delta x$ and vertical distance $\delta y$. The length of each segment is weighted by the probability it gets traveled, which is $\frac{1}{2} + \frac{1}{2}\left(1-x\right)$. We also consider the probability that you have to walk around the wall, which for a given segment is $\frac{1}{2}\delta x$. The distance it takes to get around the wall is just $(H-y) + \sqrt{H^2 + (1-x)^2}$, where $H=\frac{1}{3}$, the half-length of the wall.
Therefore the expected distance $E$ should be equal to:
$$ E = \sum_{i=1}^N\frac{2-x}{2}\sqrt{\delta x_i^2 + \delta y_i^2} + \frac{\delta x_i}{2}\left((H-y_i) + \sqrt{H^2 + (1 - x_i)^2}\right) $$
If we treat $y$ as a function of $x$ (assuming that the optimal path doesn't travel backward) we can factor out $\delta x$, since $\delta y = y'(x)\delta x$; then taking the limit as $\delta x\to 0$ we obtain an integral:
$$ E = \frac{1}{2}\int_{0}^{1}(2 - x)\sqrt{1 + y'(x)^2} + H - y(x) + \sqrt{H^2 + (1-x)^2}~\mathrm{d}x $$
Now I try to use the Euler-Lagrange equations to find the path $y(x)$ that minimizes $E$:
$$ E = \int \mathcal{L}(x, y(x), y'(x))~\mathrm{d}x \\ \mathcal{L}(x, y(x), y'(x)) = \frac{1}{2}\left((2 - x)\sqrt{1 + y'(x)^2} + H - y(x) + \sqrt{H^2 + (1-x)^2}\right) \\ \frac{\partial \mathcal{L}}{\partial y(x)} - \frac{\mathrm{d}}{\mathrm{d}x}\frac{\partial \mathcal{L}}{\partial y'(x)} = 0 \\ \left[-\frac{1}{2}\right]-\frac{\mathrm{d}}{\mathrm{d}x}\left[\frac{(2-x)y'(x)}{2\sqrt{1+y'(x)^2}}\right]=0 \\ 1 = \frac{y'(x)(1 + y'(x)^2) - (2-x)y''(x)}{\left(1+y'(x)^2\right)^{3/2}} \\ y''(x) = \left(1+y'(x)^2\right)\frac{y'(x)-\sqrt{1+y'(x)^2}}{2-x} $$
A solution to this differential equation should be a minimum-distance path, as long as it satisfies $y(x) \le H$ for all $x\in[0,1]$. The boundary conditions are $y(0)=y(1)=0$. Mathematica finds an explicit solution, but it it is extremely complex. The simplest form I can get it in is:
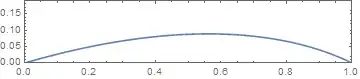
$$ y(x) = \frac{168 \left(9 \sqrt{6}+\sqrt{38}\right) \xi -\sqrt{131-9 \sqrt{57}} \xi^3 - 448 \sqrt{3710+378\sqrt{57}}}{2688 \left(27+\sqrt{57}\right)} \\ \xi = \sqrt{7 \left(43+\sqrt{57}\right)-8 \left(27+\sqrt{57}\right) x} \\ y(x) \approx 0.3929 x\sqrt{1.2802-x} +0.3454 \sqrt{1.2802-x}-0.3908 $$
The solution looks like this:
The Question
Is this approach valid, and are my calculations correct?